 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniGeo: A Unified 3D Indoor Object Detection Framework Integrating Geometry-Aware Learning and Dynamic Channel Gating
Jan 30, 2026The growing adoption of robotics and augmented reality in real-world applications has driven considerable research interest in 3D object detection based on point clouds. While previous methods address unified training across multiple datasets, they fail to model geometric relationships in sparse point cloud scenes and ignore the feature distribution in significant areas, which ultimately restricts their performance. To deal with this issue, a unified 3D indoor detection framework, called UniGeo, is proposed. To model geometric relations in scenes, we first propose a geometry-aware learning module that establishes a learnable mapping from spatial relationships to feature weights, which enabes explicit geometric feature enhancement. Then, to further enhance point cloud feature representation, we propose a dynamic channel gating mechanism that leverages learnable channel-wise weighting. This mechanism adaptively optimizes features generated by the sparse 3D U-Net network, significantly enhancing key geometric information. Extensive experiments on six different indoor scene datasets clearly validate the superior performance of our method.
Modelling Protagonist Goals and Desires in First-Person Narrative
Aug 29, 2017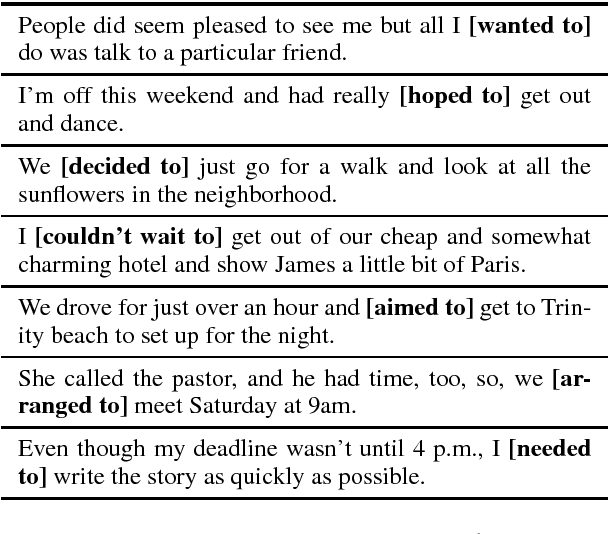
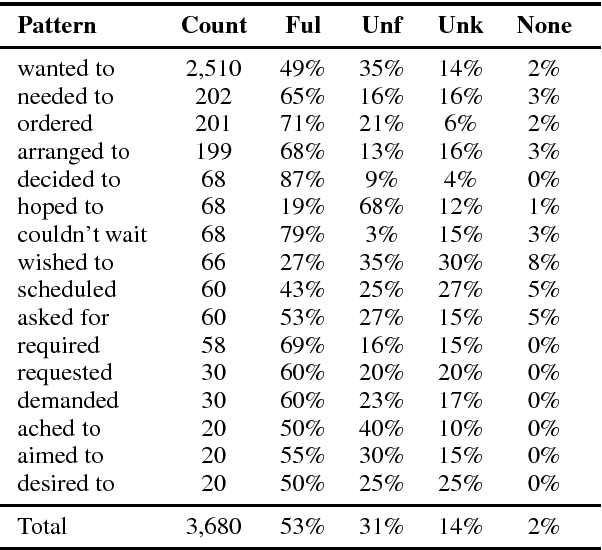
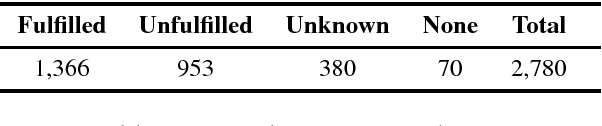
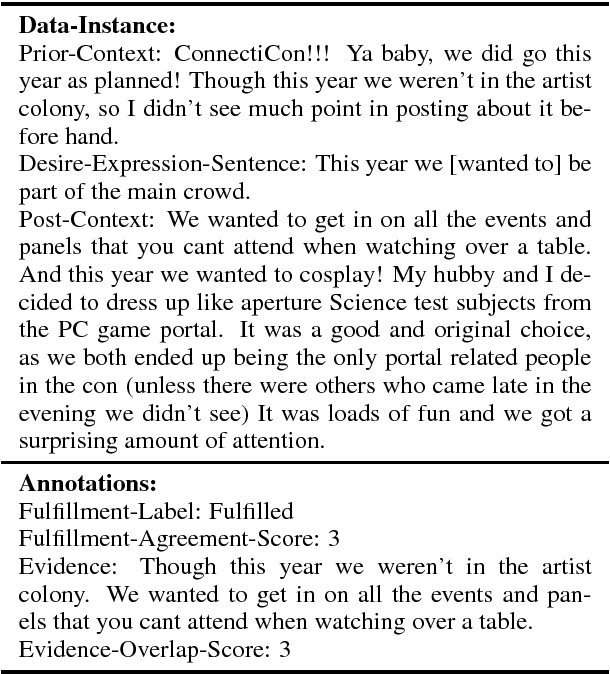
Many genres of natural language text are narratively structured, a testament to our predilection for organizing our experiences as narratives. There is broad consensus that understanding a narrative requires identifying and tracking the goals and desires of the characters and their narrative outcomes. However, to date, there has been limited work on computational models for this problem. We introduce a new dataset, DesireDB, which includes gold-standard labels for identifying statements of desire, textual evidence for desire fulfillment, and annotations for whether the stated desire is fulfilled given the evidence in the narrative context. We report experiments on tracking desire fulfillment using different methods, and show that LSTM Skip-Thought model achieves F-measure of 0.7 on our corpus.